HVAC motor and pump shop in Sacramento, established in 1949. With our extensive experience, we provide the most trusted products and rebuild services to our local community and beyond.
We provide FREE motor bench testing to identify possible problems and determine the best course of action: repair or replacement. If repair is the economical option, we excel at refurbishing electric motors in our in-house machine shop to make them look and function like new.
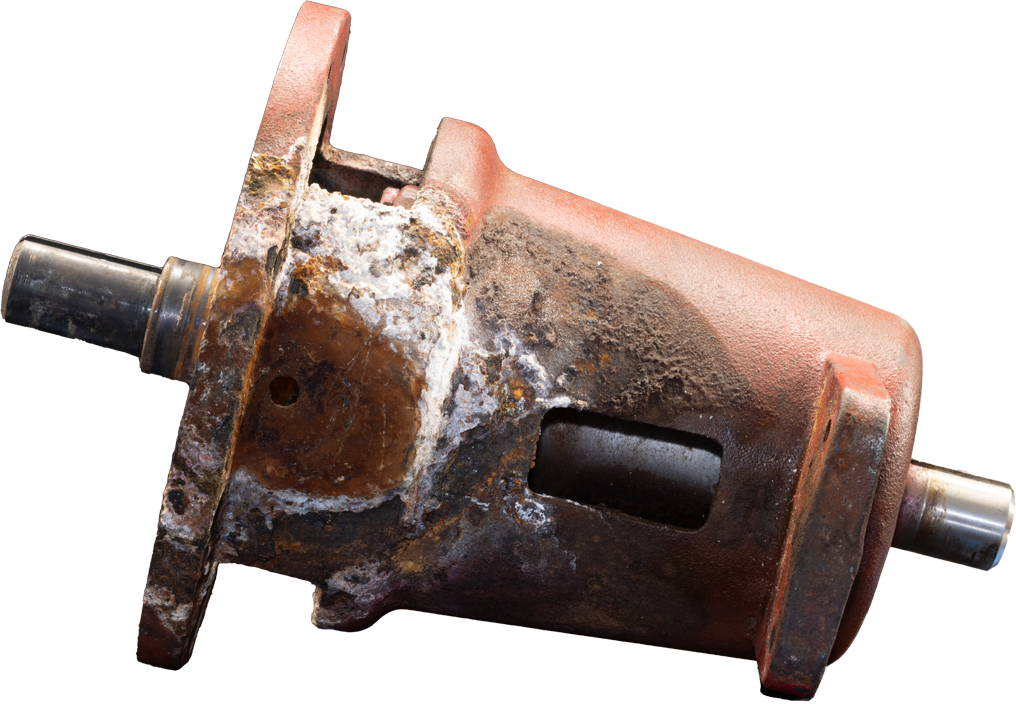
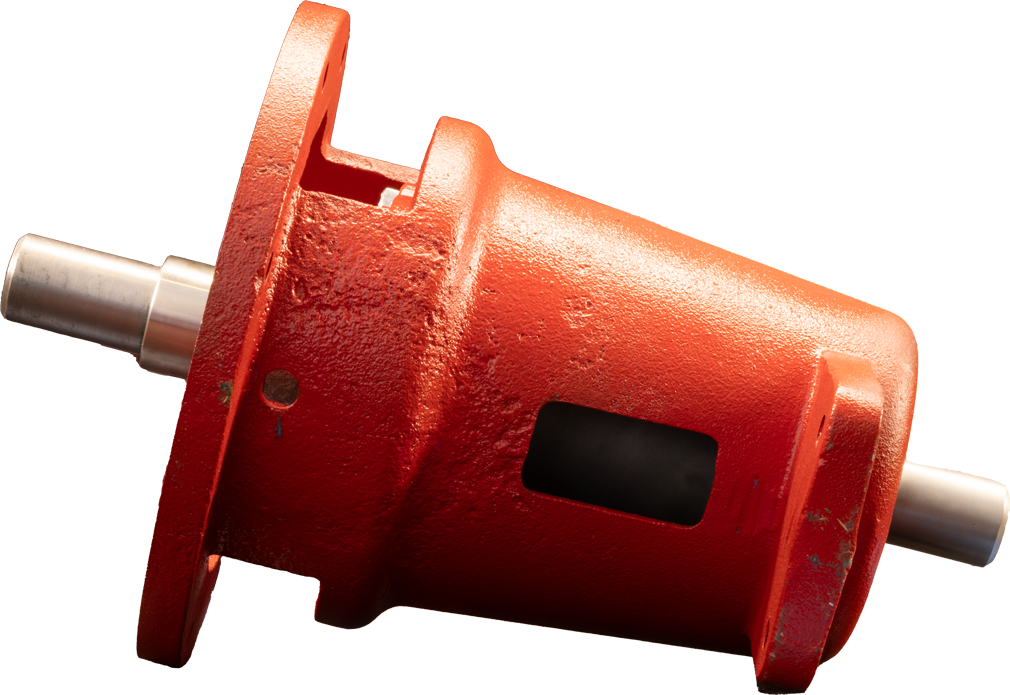
Speedy & Long Lasting Pump Repair
When getting a new pump isn’t an option, due to many manufacturer’s ever-increasing lead times, we conveniently offer fast and efficient repairs. Our comprehensive repair process eliminates leaks and restores pumps to like-new condition, and we’re known for our industry-leading speed, often finishing repairs in the same day.
Knowledgeable Sales Team
Our trained sales associates can help you match up motors, pumps, fan blades, blower wheels, capacitors, contactors, and much more!
After Hours Emergency?
Sometimes, the need for a replacement motor is urgent and can’t wait. That’s why, for a $150 after-hours fee, our dedicated sales team is ready to assist you at any time, including weekends! We will promptly reopen the shop and match you with the perfect replacement motor.
Sometimes, the need for a replacement motor is urgent and can’t wait. That’s why, for a $150 after-hours fee, our dedicated sales team is ready to assist you at any time, including weekends! We will promptly re-open our shop and match you with the perfect replacement motor.